

A team of engineers from MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) have managed to make a robot hand that can grab and pick up delicate objects without causing them any damage.
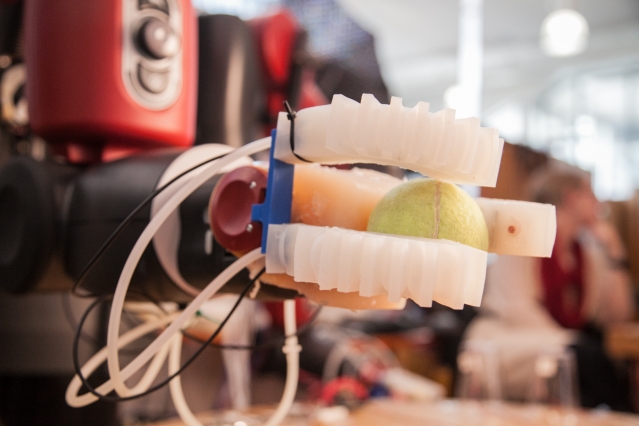
Image credit: Jason Dorfman/CSAIL
The 3D printed hand is made of silicone rubber and has embedded sensors that help it identify what sort of object it is grabbing.
Aside from the sensors, the robotic hand also has pneumatic pistons that help it control how soft or hard it needs to grab the object. The pistons cause little bubbles to expand in the fingers, spurring them to stretch and bend.
What makes this 3D printed “gripper” unlike any other robotic hand that has been made so far is its ability to handle irregularly-shaped objects, squeeze into tight spaces, and readily recover from collisions.
The robotic hand has been attached to a Rethink Robotics’ Baxter robot and has managed to successfully pick various objects like an egg, a paper cup and a pair of glasses without damaging them. The hand is also dexterous and able to pick up a single sheet of paper and a pencil with ease.

“Robots are often limited in what they can do because of how hard it is to interact with objects of different sizes and materials. Grasping is an important step in being able to do useful tasks; with this work we set out to develop both the soft hands and the supporting control and planning systems that make dynamic grasping possible,” said CSAIL Director Daniela Rus.
“If we want robots in human-centred environments, they need to be more adaptive and able to interact with objects whose shape and placement are not precisely known. Our dream is to develop a robot that, like a human, can approach an unknown object, big or small, determine its approximate shape and size, and figure out how to interface with it in one seamless motion.”
The work was done in the Distributed Robotics Laboratory at MIT with support from The Boeing Company and the National Science Foundation.
The team of researchers published their research in the proceedings of the IEEE’s robotic conference in Hamburg.


















